Repérage d'un point - Vitesse et accélération (2)
Les vecteurs sont notés en gras.
Coordonnées curvilignes - Base de Frénet
Repérage d'un point - Abscisse curviligne
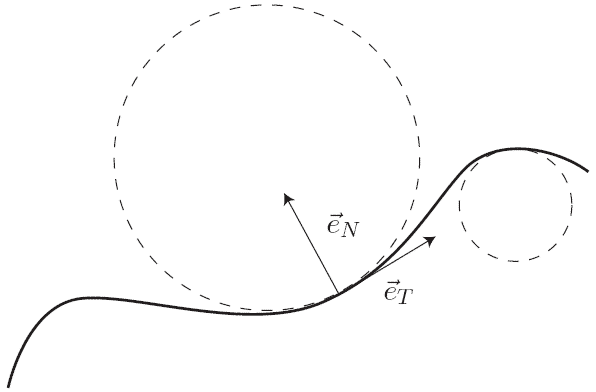
On repère le point sur sa trajectoire (courbe orientée) par son abscisse curviligne :
et forment la base de Frénet.
est le vecteur unitaire tangent à la trajectoire orienté selon le sens positif; s'obtient en tournant de vers l'intérieur de la concavité.
Vecteur vitesse et vecteur accélération
est la composante tangentielle de l'accélération.
est la composante normale de l'accélération.
Pourquoi ?
Quand on dérive (par rapport au temps), il faut toujours faire le point sur ce qui dépend du temps.
mais aussi !
Donc ; en identifiant ou encore
Coordonnées polaires et cylindriques
Repérage d'un point - Vecteur position
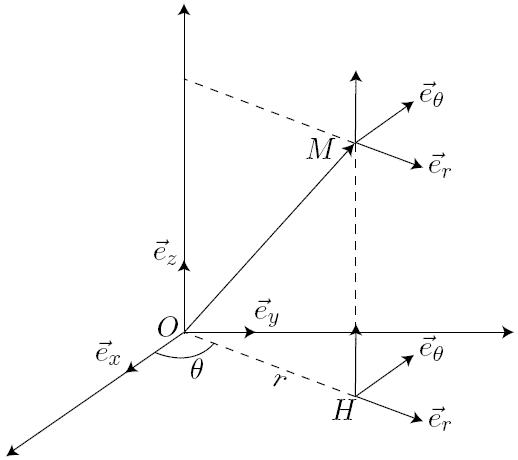
De la même manière que , et
définissaient de façon unique la position de M, les coordonnées cylindriques
,
de 0 à et
de
à
définissent aussi de façon unique la position de M.
Si le mouvement est plan, on utilise les coordonnées polaires .
défini un cylindre de rayon (un cercle en coordonnées polaires).
défini un demi plan perpendiculaire au plan (une demi droite en coordonnées polaires).
défini un plan parallèle au plan .
,
et forment la base cylindrique ( et la base polaire) :
,
s'obtient en tournant de dans le sens des croissant,
est le troisième vecteur de la base cartésienne.
Le vecteur position s'écrit dans la base cylindrique
et dans la base polaire
Relations entre paramétrage cylindrique ou polaire et paramétrage cartésien
On remarque en particulier que ou encore
On pourra vérifier que
On peut retenir la règle suivante : vecteur obtenu par une rotation de dans le sens des croissant.
Vecteur vitesse et vecteur accélération
, , , mais aussi et dépendent du temps.
en polaire.
Calculons le vecteur accélération :
est la composante radiale de l'accélération.
est la composante orthoradiale de l'accélération.
est la composante axiale.
Calculons le vecteur déplacement élémentaire :