Repérage d'un point - Vitesse et accélération (3)
Les vecteurs sont notés en gras.
Coordonnées sphériques
Repérage d'un point - Vecteur position
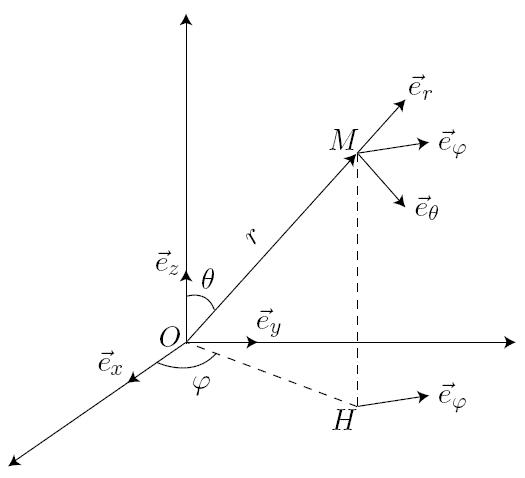
Les coordonnées sphériques définissent de manière unique la position du point M :
peut varier de 0 à
peut varier de 0 à
peut varier de 0 à
Les vecteurs , et constitue la base sphérique :
est obtenu en tournant de dans le sens des croissant à partir du vecteur
Le vecteur position s'écrit dans la base sphérique :
Relation entre paramétrage sphérique et paramétrage cartésien (voir TD)
Vecteur vitesse et vecteur accélération (voir TD)
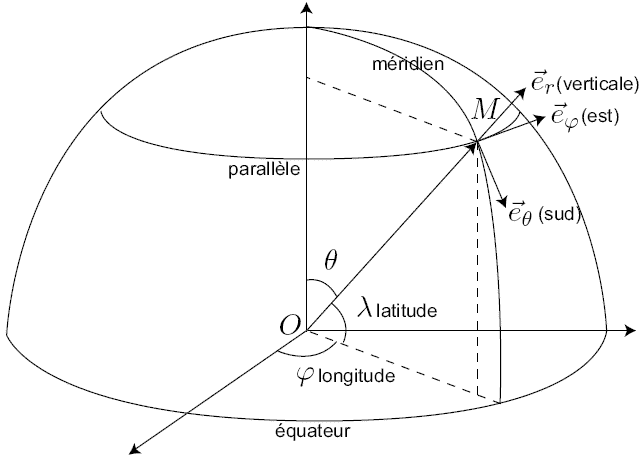
Coordonnées géographiques
Exemples de mouvement
Vecteur accélération constant
Mouvement rectiligne sinusoïdal
Mouvement circulaire
Le paramétrage polaire est le mieux adapté :